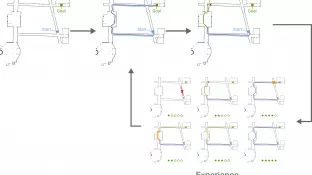
Experience Sharing for Long-term Autonomy in Multi-Robot Systems
Doctoral project at a glance
Departments and Instituts
Period
23.11.2020 to 22.11.2025
Doctoral candidate
Supervising professor
Project Description
In long-term missions, robots repeat their programmed tasks over and over again, creating new plans each time. One of PhD student Argentina Ortega's research goals is to investigate how robots can improve their planning by using information from their previous runs. From this information, she creates experience models so that robots can reuse their previous plans in an optimised form. This reduces deployment costs while increasing transparency, explainability and system throughput.