Experience Sharing for Long-term Autonomy in Multi-Robot Systems
Promotionsprojekt im Überblick
Fachbereiche und Institute
Zeitraum
23.11.2020 to 22.11.2025
Doktorandin/Doktorand

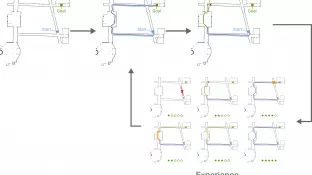
Projektbeschreibung
In Langzeiteinsätzen wiederholen Roboter ihre programmierten Aufgaben immer wieder und erstellen jedes Mal neue Pläne. Eines der Forschungsziele von Doktorandin Argentina Ortega ist es, zu untersuchen, wie Roboter ihre Planung verbessern können, indem sie Informationen aus ihren früheren Läufen verwenden. Aus diesen Informationen erstellt sie Erfahrungsmodelle, damit der Roboter seine früheren Pläne in optimierter Form wiederverwenden kann. Dies senkt die Bereitstellungskosten und erhöht gleichzeitig die Transparenz, Erklärbarkeit und den Systemdurchsatz.