E3C
Forschungsprojekt im Überblick
Fachbereiche und Institute
Zeitraum
24.09.2013 to 24.02.2018

Projektbeschreibung
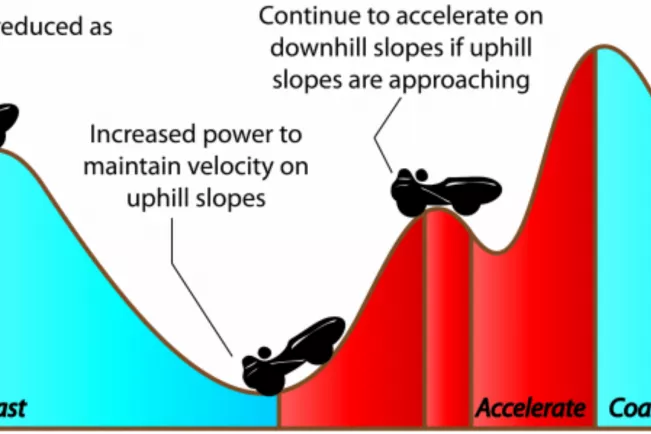
Im Projekt E3C entwickeln und prüfen wir verschiedenste Verfahren, um elektrisch unterstützte Leichtfahrzeuge wie E-Bikes optimal zu steuern. Optimal steuern bedeutet hier, ein Fahrzeug so zu beschleunigen, dass gleichzeitig der Energieaufwand minimiert und ein festes Zeitfenster eingehalten wird. Zu diesem Zweck werden Fahrstrategien berechnet, die dem Fahrer während seiner Reise jederzeit den optimalen Steuerbefehl anzeigen bzw. das E-Bike teil-autonom steuern und sich der gegenwärtigen Verkehrssituation anpassen.
Die Suche nach der optimalen Befehlsfolge wird mathematisch als Optimierungsproblem formuliert. Hierbei wird das Fahrzeug ausgehend vom Energiespeicher über die Motorsteuerung bis zur Antriebseinheit in Computermodellen nachgebildet. Im späteren Verlauf werden darüber hinaus der Fahrer und weitere Einflussfaktoren wie Verkehrshindernisse einbezogen. Solche Computermodelle werden von zahlreichen Parametern beeinflusst, die es zu identifizieren und zu optimieren gilt. Beispiele sind der Strömungs- und Rollwiderstand des Fahrzeugs.
Unter Einsatz der Computermodelle werden Fahrten über eine vorgegebene Strecke simuliert, um so die Fahrstrategie mit minimalem Energieaufwand zu finden. Für die dazu notwendige Suche kommen sowohl klassische optimale Suchverfahren als auch approximative Verfahren des maschinellen Lernens zum Einsatz, die vergleichbare Effizienz mit dem Vorteil kombinieren, sich jederzeit adaptiv auf die aktuelle Situation anzupassen.
Als zukünftige Anwendung sind neben ECO-Drive-Assistenten auch Navigationssysteme denkbar, die neben der kürzesten Route auch diejenige Route mit dem geringsten Energieaufwand berechnen können.
Ergebnisse
Abschluss- und Projektarbeiten
- Bastian Lang: Real World Optimization of Energy Efficient Vehicle Control, Research&Development project, work in progress
- Helge Spieker: Vorausschauendes Fahren/Optimal Hybrid Control, Masterprojekt, work in progess
- Adam Gaier: Fuel Optimal Control Policies using Evolutionary Strategies, Research&Development project, 2013
Auszeichnungen
- Adam Gaier: beste Studienarbeit, DRIVE-E-Studienpreis (BMBF/Fraunhofer), 2015
(Pressemitteilung des BMBF)
Publikationen
- Adam Gaier and Alexander Asteroth. Evolution of optimal control for energy-efficient transport. In Intelligent Vehicles Symposium, Proceedings, pages 1121–1126. IEEE, 2014.
- Adam Gaier and Alexander Asteroth. Evolving Look Ahead Controllers for Energy Optimal Driving and Path Planning. In International Symposium on INnovations in Intelligent SysTems and Applications, Proceedings, IEEE, 2014